JumpTest o Test di Bosco/Vittori
Questa è una guida per costruire un cronometro da pista partendo da zero. Se avete bisogno di un prodotto già costruito e pronto all’uso consultate il nostro sito https://www.chronofit.it.
Nell’atletica è molto importante riuscire a valutare la capacità di contrarre i muscoli e quindi esercitare forza nel tempo più breve possibile. Questa caratteristica in gergo viene detta “esplosività”.
“Il test di Bosco ha lo scopo di valutare le caratteristiche morfologiche e, funzionali dei muscoli degli arti inferiori e le capacità neuromuscolare”.
Iscriviti al nostro canale YouTube per saperne di più! 🙂
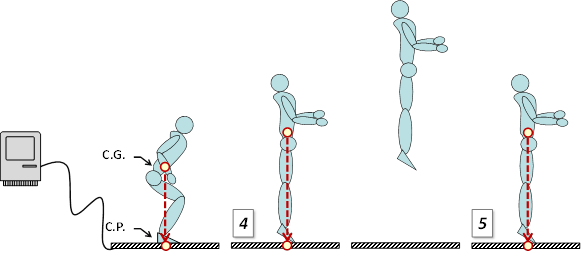
Le prove che più di frequente vengono eseguite sono: Squat Jump (SO), Counter Movement Jump (SCM), SCM con le braccia libere (SCMB) ed il test di reattività (SH). Viene utilizzata una pedana che consente la misurazione elettronica del tempo di volo e del tempo di contatto dei piedi al suolo al momento dell’impatto prima di ogni singolo balzo successivo. Il test serve a calcolare l’ elevazione raggiunta durante le quattro prove.
Potendo misurare il tempo di contatto, è possibile anche determinare la potenza muscolare sviluppata. Dal tempo di volo impiegato e conoscendo la costante gravitazionale è possibile determinare l’elevazione applicando la seguente formula:
dove T indica il tempo di volo e g la costante di 9,81.
Quello che il codice che gira su Arduino fa è in definitiva misurare gli istanti nei quali ci si trova sulla pedana e quelli in cui ci si stacca dalla pedana, in questo modo è possibile determinare sia il tempo di contatto che il tempo di volo. Sono entrambi parametri importanti, se si riesce a raggiungere una ELEVAZIONE maggiore con il minor tempo di contatto si è maggiormente “esplosivi”.
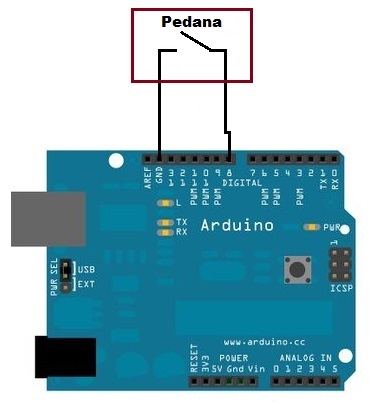
Il rilevamento del contatto o meno avviene attraverso una apposita pedana. Questa non fa altro che chiudere un circuito se è presente un corpo sopra di essa e aprirlo in caso contrario. All’atto pratico, dal punto di vista elettrico, la pedana non svolge altro che la funzione di INTERRUTTORE.
Come vedremo successivamente nel codice non è necessaria una resistenza di PULL-UP esterna perché ho utilizzato il PULL-UP interno al uC.